
IMU sensor module that well be using is centered around an MPU-6050 sensor. Before we use the MPU6050 in our Arduino project it would be good to see how accelerometers and gyroscopes really work.

Guide To Interfacing A Gyro And Accelerometer With A Raspberry Pi

Witmotion Wt61 6 Axis Ahrs Sensor Digital Tilt Angle Inclinometer Accelerometer Gyroscope Mpu6050 Module

Arduino Imu Pitch Roll From An Accelerometer The C Continuum
IOT Projects Using Arduino.
Angle measurement using gyro accelerometer and arduino. The information that we can get from a MPU9250s are. Both X and Y outputs of accelerometer would output the zero-g voltage for example for Acc_Gyro board this is 165V - next start rotating the device around the Y axis another way to say it is that you rotate the device in XZ plane so that X and Z accelerometer outputs change and Y output remains constant. How to measure velocity with arduino.
If you still want more information you can google sensor fusion with complementary filter there are plenty of articles about this. As the MPU-6050 interfaces using the I2C bus. It can take both dynamic and static readings.
Sadly in the. Inertial measurement unit is nothing but measurement of Agular rate. By combining a MEMS 3-axis gyroscope and a 3-axis accelerometer on the same silicon die together with an onboard Digital Motion Processor DMP capable of processing complex 9-axis MotionFusion algorithms the MPU-6050 does away with the cross-axis alignment problems that can creep up on discrete parts.
A gyroscope from Ancient Greek γῦρος gûros circle and σκοπέω skopéō to look is a device used for measuring or maintaining orientation and angular velocity. The MPU-6050 belongs to a class of devices known as Inertial Measurement Units or IMUs. If you want a long-term angle measurement on.
A library for the APDS9960 sensor. It supports the following sensor chips. The MPU-6050 devices combine a 3-axis gyroscope and a 3-axis accelerometer on the same silicon die together with an onboard Digital Motion Processor DMP which processes complex 6-axis MotionFusion algorithms.
Thus we can see that a gyroscope sensor and an accelerometer complement each other. The combination of 3D gyro and 3D accelerometer allows a six-axis gyro to measure the amount of static acceleration due to gravity and also the amount of dynamic acceleration. The MPU6050 has both a gyroscope and an accelerometer using which we can measure rotation along all three axes static acceleration due to gravity as well as motion shock or dynamic acceleration due to vibration.
Whats new in Version 211 aka Change log. My plan is to build an Inertial Measurement Unit IMU or maybe I should. The MPU-6050 IMU is a 3-axis accelerometer and gyroscope sensor.
Allows you to read the accelerometer and gyroscope values from the LSM6DS3. A gyroscope sensor on the other hand can be used to detect gravitational motion. Check out this portable AHRS Attitude and Heading 3DP Chip Home Page.
Both of these components are used in various modern devices. Correct the drift of the gyro. The MPU6050 is an Inertial Measurement Unit IMU that combines a MEMS gyroscope and accelerometer and uses a standard I2C bus for data communication.
An accelerometer is noisy compared to gyro though. In the steps that follow we will see how to interface the MPU6050 with Arduino how to measure the angle of inclination of the robot how to use PID to make the robot stay balanced. For this calculation the gyro provides a position in degrees in pitch roll and yaw the magnetometer provides an angle for yaw while the accelerometer provides its own numbers for pitch and roll.
One day looking for cheap sensors on ebay I found this interesting board which contained everything I was looking for. The MPU-6050 is a serious little piece of motion processing tech. In C implementation to avoid unnecessary conversion I think to get the tilt of accelerometer it will be better to just stick with ADCRx 512 using 10 bit adc to get the angle at 33V input at the accelerometer the typical 0deg position will be 165 which will yield also 512 in a 33V vref a greater than 512 value means tilt angle at the 1st quadrant then a less than 512 adc reading.
Ill sometimes use the term IMU in reference to the MPU6050 in this article. Yaw angle pitch angle and roll angle. Each of them has numerous applications.
Orientation is determined with high accuracy for both motionless and dynamic. Well its been a while - nearly 2 months. Use the MPU-6050 accelerometer and gyroscope module with ESP8266 NodeMCU using Arduino IDE.
When rotating the orientation of this axis is unaffected by tilting or rotation of the mounting. This article will explain how to use the data coming from an MPU6050 device by using C code examples and some illustrative diagrams. Thats why I thought I might release the updates I already have and keep the rest for later And well there are quite a few new features.
It basically consists of a 3-axis accelerometer ADXL345 a 3-axis magnetometer HMC5883L a 3-axis gyroscope L3G4200D and a barometric pressure sensor BMP085. TVOC and CO2 Measurement using Arduino and CCS811 Air Quality Sensor. The GY-521 has an InvenSense MPU6050 chip which contains a 3-axis accelerometer and a 3-axis gyro meter.
Given that I will only deal with yaw here in. It is a spinning wheel or disc in which the axis of rotation spin axis is free to assume any orientation by itself. I did some groundwork and tried to tidy up a lot of code but in the end Im just half done.
This is a tiny robot measuring 4 inches wide and 4 inches tall and is based on the Arduino Pro Mini development board and the MPU6050 accelerometer-gyroscope module. For this it uses the Arduino flight controller board along with various sensors such as gyro scope and accelerometer. These two measurements help us determine the angle the device is tilted and figure out the way the device is moving.
On the Arduino Uno the I2C connections are made using the Analog input pins. Allows you to read the temperature and humidity sensors of your Nano 33 BLE Sense. An accelerometer is a device that can be used to detect non-gravitational motion.
Advantages of Six-Axis Gyro Stabilization. Automatic Rain Sensing Wiper Using Arduino This project is designed to build a car wiper that automatically detects the rainfall intensity and. Allows you to read the pressure sensor of your Nano 33 BLE Sense.
But there is a new version available now. Arduino Forum Using Arduino Sensors whats difference between mpu92509255 BMX055 and MPU9250 Accelerometer SEM PlanAngle View Image BMX055 and MPU9250 Accelerometer SEM Cross Section Image BMX055 and MPU9250 Accelerometer Bonding Cross Section Image HiLetgo MPU92506500 9-Axis 9 DOF 16 Bit Gyroscope Acceleration Magnetic Sensor 9-Axis Attitude. The MPU-6050 is an inertial measurement unit IMU of six degrees of freedom 6DOF manufactured by Invensense which combines a 3-axis accelerometer and a 3-axis gyroscope.
It can calculate the angle at the time given by the user. Im currently trying to use a accelerometer gyroscope module specifically MPU6050 with Arduino in order to track some specific kind of movements in the human body. LSM6DS33 accelerometer and gyro Start your Arduino IDE navigate to the folder you have just created and open up the EFIS_AHRS.
The MPU9250 has an accelerometer gyroscope and a magnetometer. We may provide additional sensors to hold the altitude level of the quadcopter. So the tracking is eliminated unlike the gyroscope.
See more on this other tutorial.

New Imems Angular Rate Sensing Gyroscope Analog Devices
Mpu6050 Arduino High Frequency Accelerometer And Gyroscope Data Saver Maker Portal

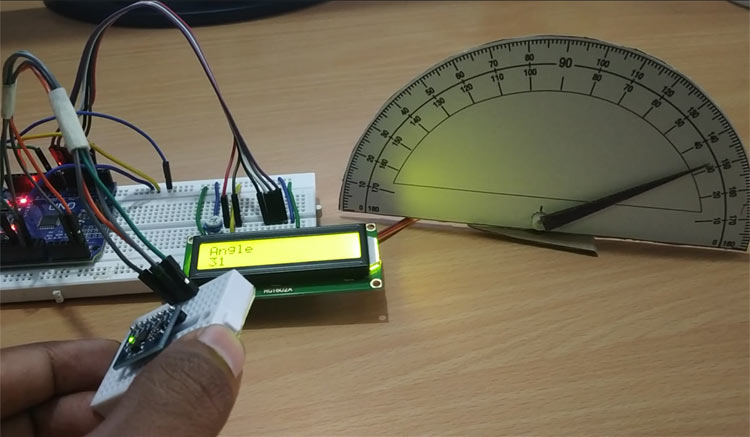
Diy Arduino Digital Protractor Using Mpu6050 Gyroscope
Accelerometer Vs Gyroscope Sensor And Imu How To Pick One Latest Open Tech From Seeed
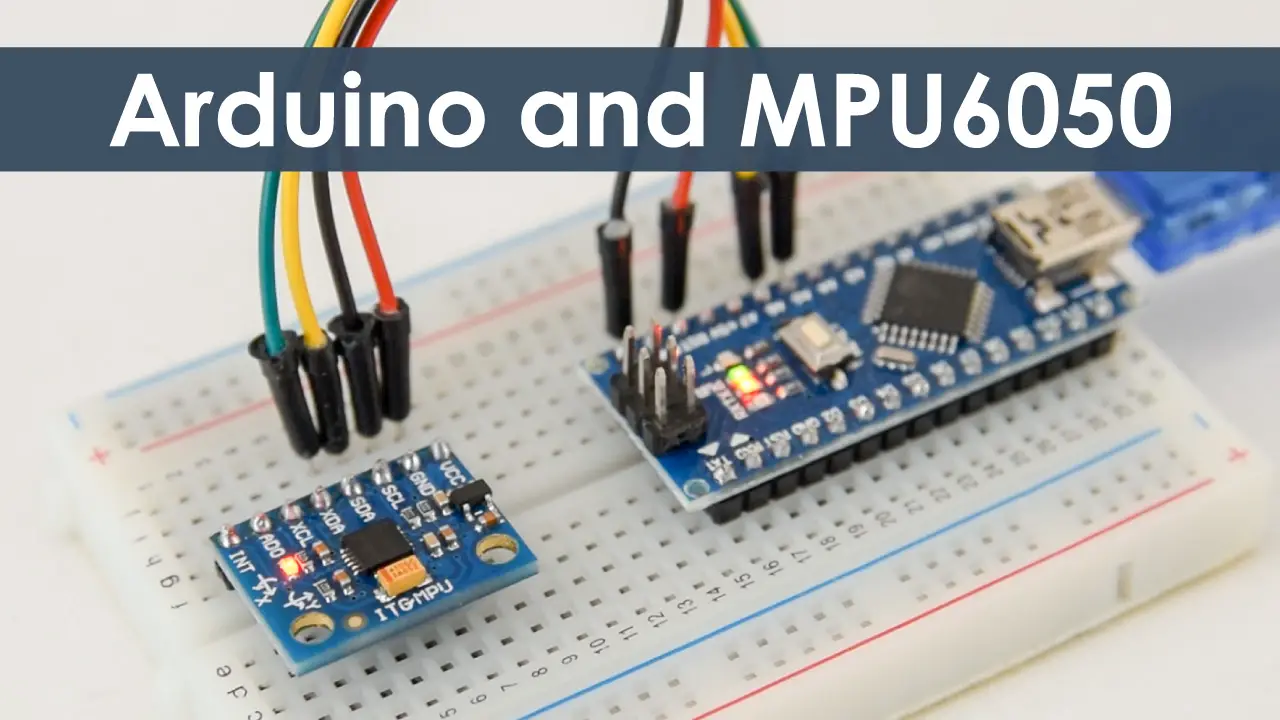
Arduino And Mpu6050 Accelerometer And Gyroscope Tutorial
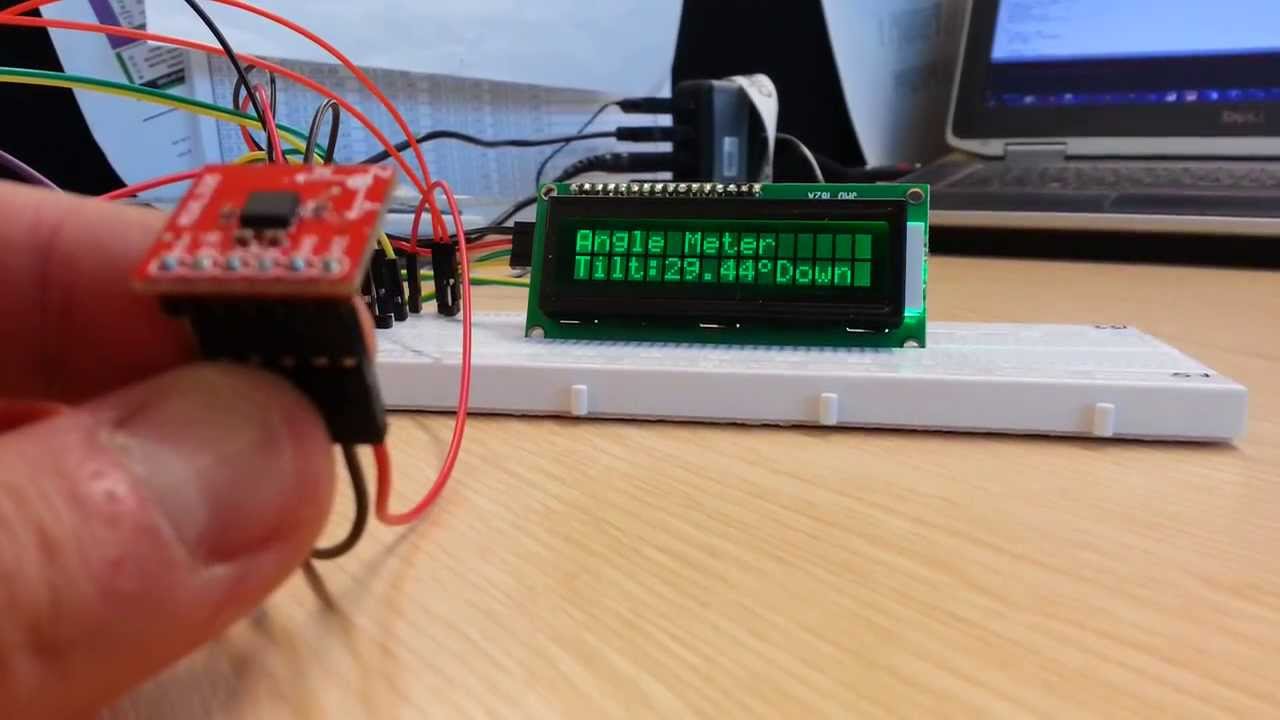
Analogue Accelerometer And Arduino Angle Meter Youtube
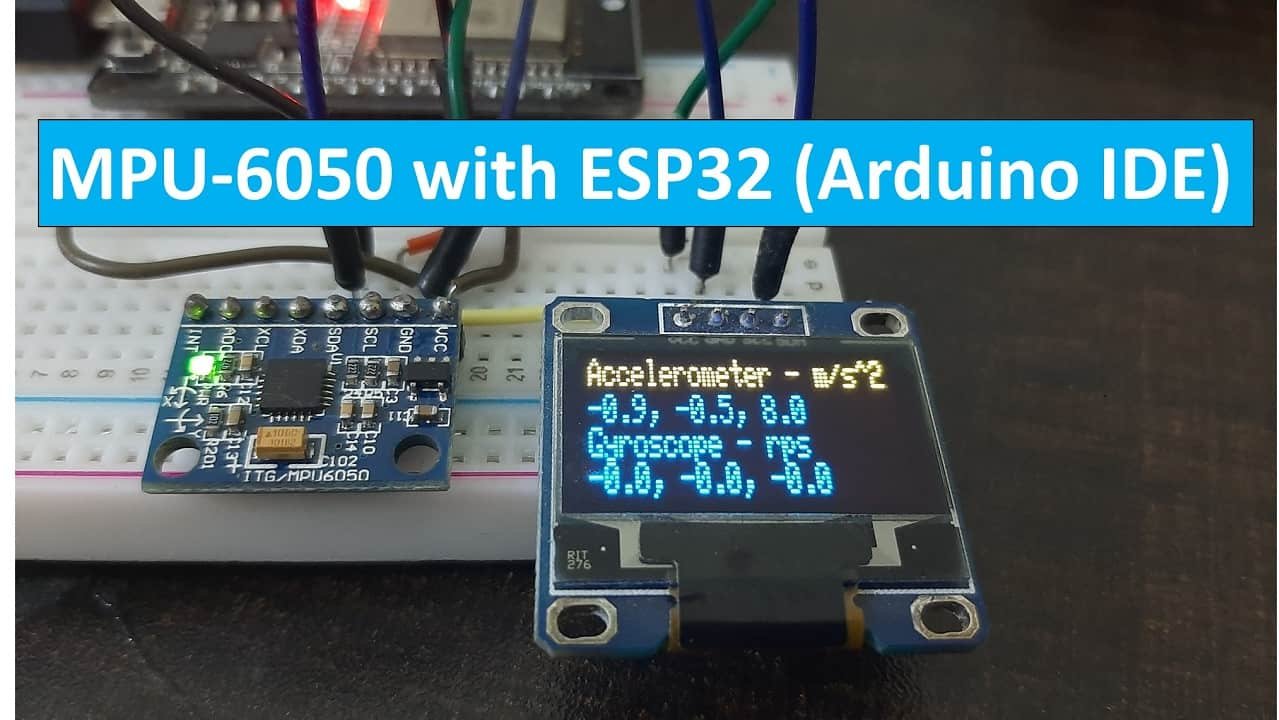
Esp32 Mpu6050 Accelerometer Gyroscope Temperature Arduino Ide

Buy Bluetooth Accelerometer Inclinometer Bwt61cl Mpu6050 High Precision 6 Axis Gyroscope Angle Xy 0 05 Accuracy Acceleration With Kalman Filter 100hz High Stability 6dof Data Logger For Arduino Online In Singapore B01mrpkdv9





